Miniature Robots with Modular Spine Compliance and Number of Legs: Design, Modeling and Locomotion Study
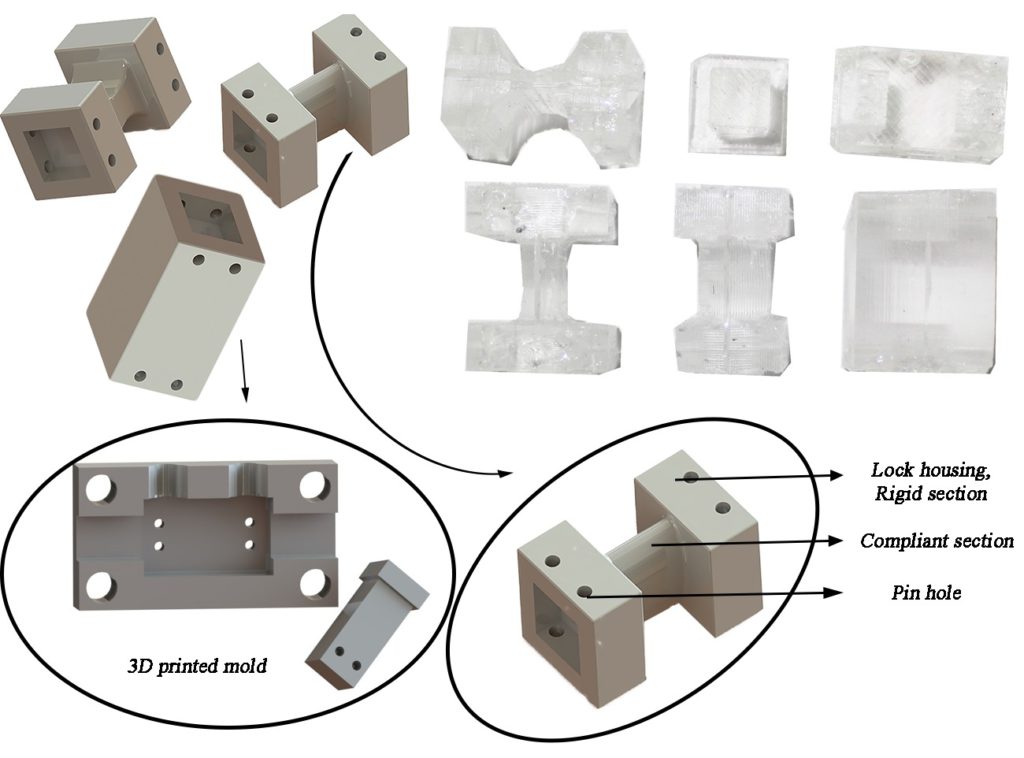
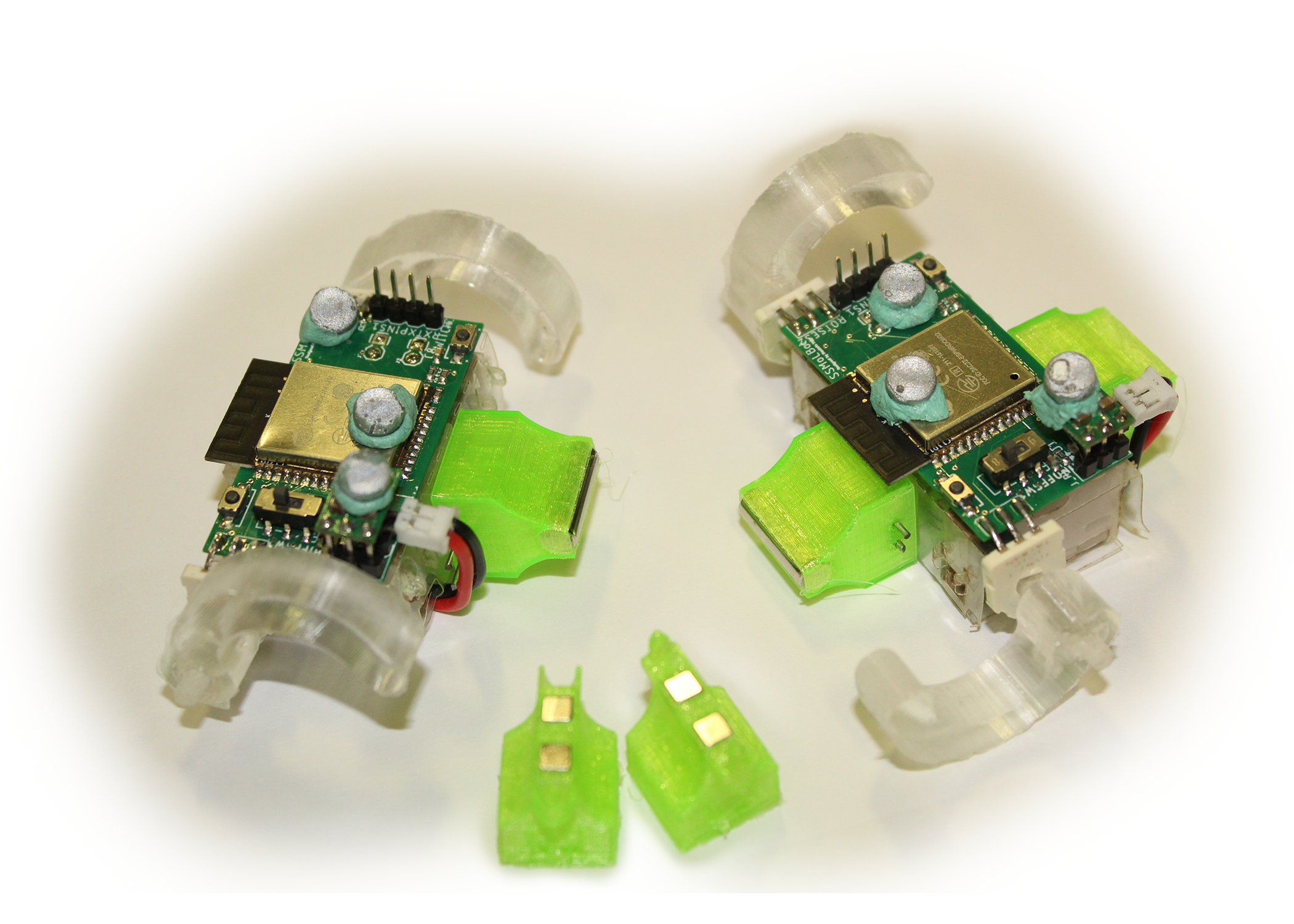
The insects that are the inspiration source for miniature legged robots are multi-legged. Because of this feature, they do not get crippled if one or more of their limbs do not function for any reason including tough environments; instead they modify their stepping pattern to account for the missing limbs. On a separate note, insects do not have spines unlike animals, instead they have an exoskeleton that provides mechanical strength. Research shows that this exoskeleton is hard yet compliant. Because of this, insects can pass through openings much smaller than their cross-sectional area. Moreover, arthropods such as centipedes can move fast by creating undulations thanks to their flexible skeletons. Both number of legs and the flexibility of the exoskeletons benefit the insects and arthropods for maneuverability and rough surface locomotion. Many robots ignore the backbone compliance and multi-legged structures of their inspiration sources. Its major reason is the difficulty in incorporating the backbone compliance to a heavy robot’s design. Active backbone joints on heavy robots imply the need for a powerful actuator, whereas passive ones might result in robot collapsing due to its weight. Multi-legged designs are not very common due to added unnecessary complexity to both large and miniature robots. The effect of backbone compliance and the number of legs on miniature robots’ locomotion capabilities are not yet analyzed and modelled extensively. Hence, often they are not incorporated in designs and their effect to robot’s locomotion capabilities cannot be estimated. The purpose of this project is to theoretically and experimentally analyze the effects of backbone compliance and number of legs on robots’ locomotion capabilities through a miniature robot with modular spine compliance and number of legs.

{kind=link}
Mahkam, N., Bakir, A., Ozcan, O. “Miniature Modular Legged Robot with Compliant Backbones” IEEE Robotics & Automation Letters, vol. 5, no. 3, pp. 3923-3930, 2020, doi: 10.1109/LRA.2020.2982362.
Mahkam N., Ozcan, O. “A framework for dynamic modeling of legged modular miniature robots with soft backbones,” Elsevier Robotics and Autonomous Systems, vol. 144, p. 103841, 2021, doi: https://doi.org/10.1016/j.robot.2021.103841.

Mahkam N., Ozcan, O. “Gait and locomotion analysis of a soft-hybrid multi-legged modular miniature robot,” Bioinspiration & Biomimetics, 2021
Mahkam, N., Yilmaz, T.B., Ozcan, O. “Smooth and Inclined Surface Locomotion and Obstacle Scaling of a C-Legged Miniature Modular Robot,” 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft), 2021, pp. 9-14, doi: 10.1109/RoboSoft51838.2021.9479218.
Mahkam, N., Ugur, M., Ozcan, O. “Effect of Feet Failure and Control Uncertainties on the Locomotion of Multi-Legged Miniature Robots,” IEEE Robotics & Automation Letters, vol. 7, no. 2, pp. 5568-5574, 2022, doi: 10.1109/LRA.2022.3157945.
Uğur M. , Uygun M. , Bakır A. , Özcan O. “Path Tracking and Connection Mechanism of a Reconfigurable, Foldable, Legged, and Miniature Robot,” Hittite Journal of Science and Engineering, vol. 9, no. 3, pp. 205-211, Sep. 2022, doi:10.17350/HJSE19030000272
Uğur, N., Arslan, B., Özzeybek, A., Özcan, O. (2023). “Effects of Compliance on Path-Tracking Performance of a Miniature Robot”, IEEE 6th International Conference on Soft Robotics (RoboSoft), 2023 (Under Review)