Cheap, Printable, Bio-Inspired Miniature Ambulatory Robot Design and Fabrication
Fabrication of bio-inspired robots are currently done either by using conventional manufacturing methods in macro-scale or by using additive manufacturing or MEMS fabrication methods in small scale. The conventional manufacturing methods result with heavy parts that cannot be scaled down to insect size, whereas the additive manufacturing or MEMS methods result with expensive, brittle, and fragile parts.
The aim of this project is to fabricate miniature bio-inspired robots using cheap materials and equipment. This includes all the components of the robots, ranging from structural materials to circuitry on the robots.
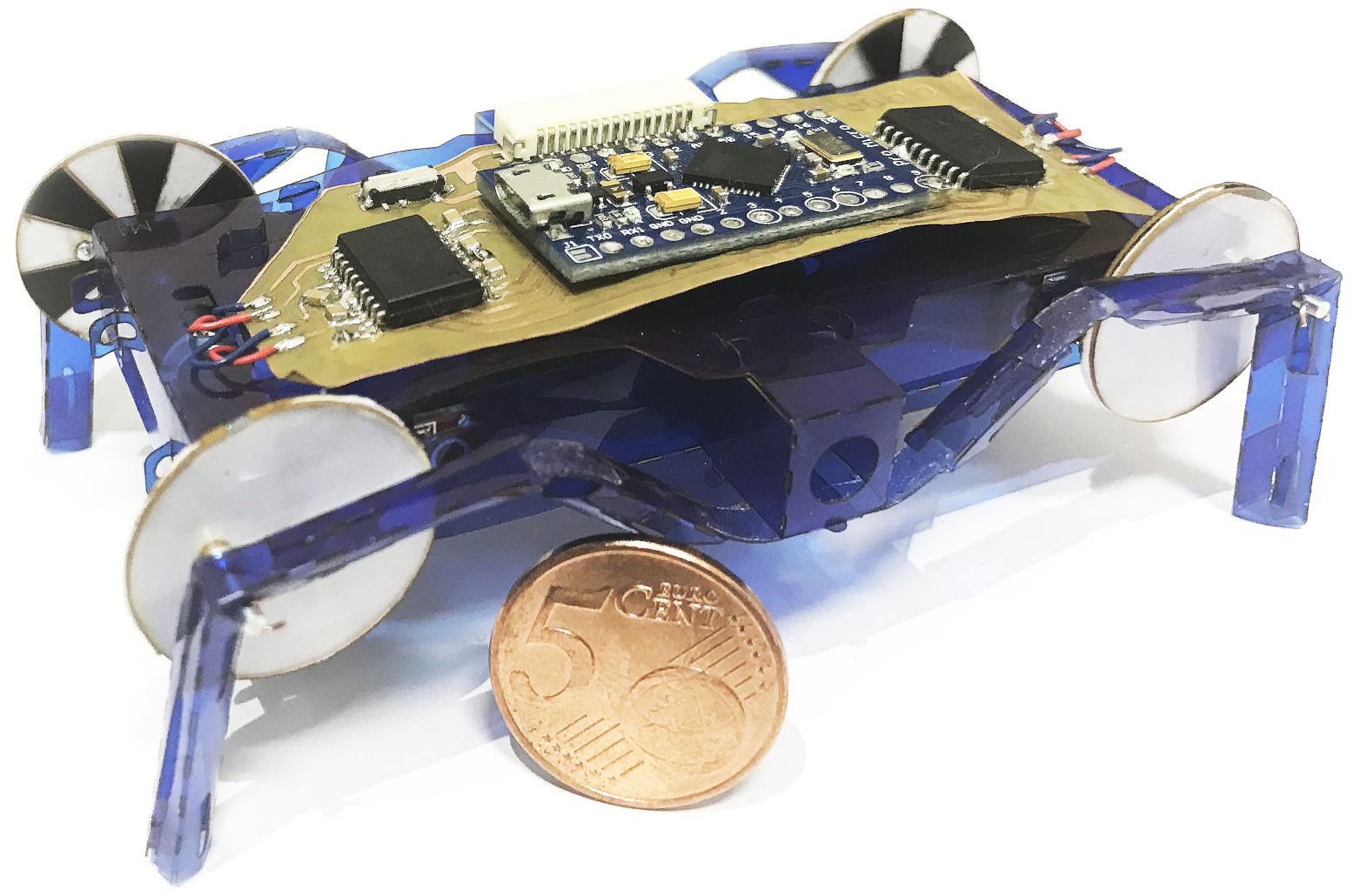
 Karakadioglu, C., Askari, M., Ozcan, O. “Design and Operation of MinIAQ: An Untethered Foldable Miniature Quadruped with Individually Actuated Legs,” IEEE AIM’17. IEEE International Conference on Advanced Intelligent Mechatronics, pp. 247-252, Munich, Germany, 2017.
Karakadioglu, C., Askari, M., Ozcan, O. “Design and Operation of MinIAQ: An Untethered Foldable Miniature Quadruped with Individually Actuated Legs,” IEEE AIM’17. IEEE International Conference on Advanced Intelligent Mechatronics, pp. 247-252, Munich, Germany, 2017.
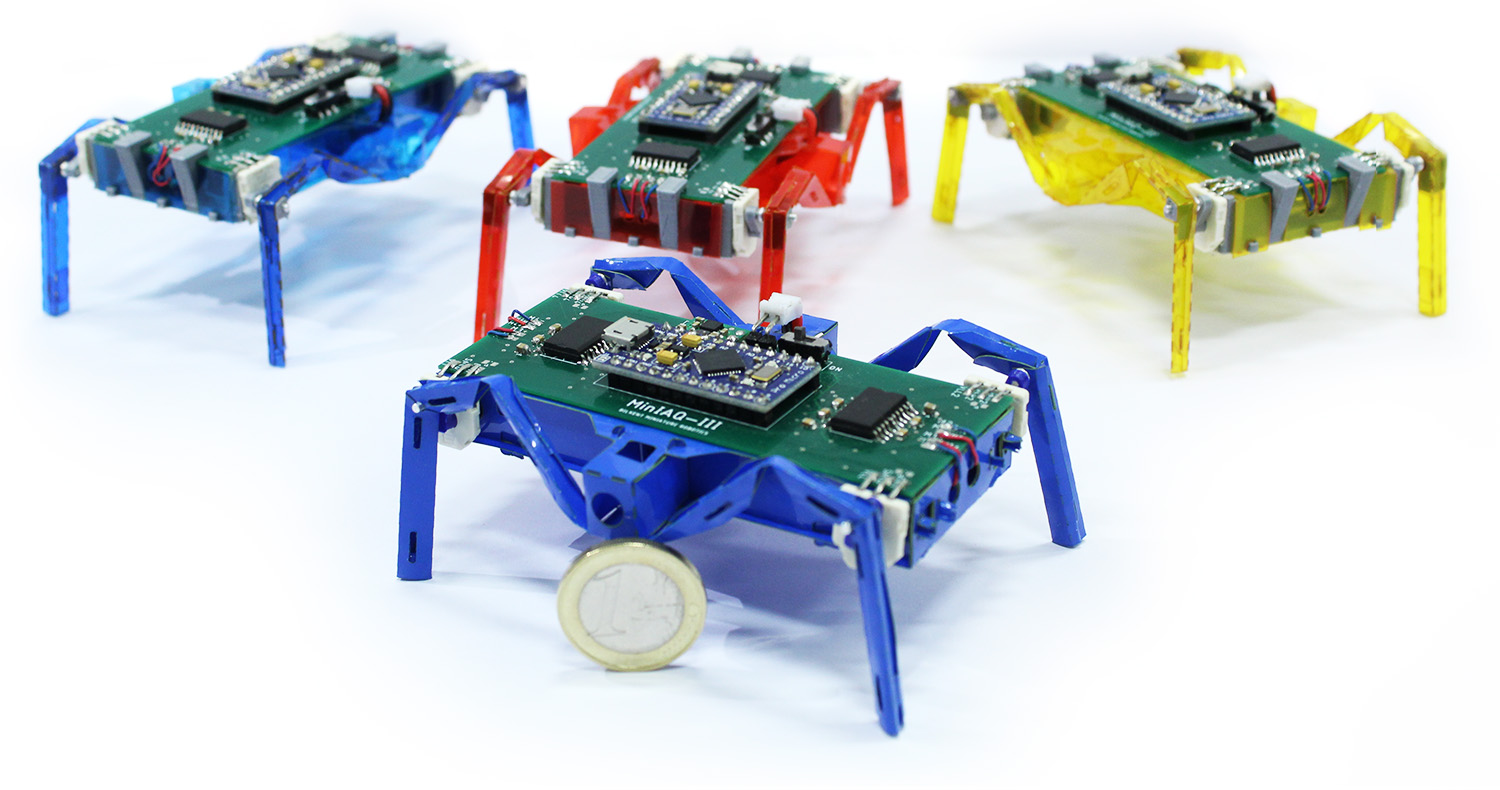
 Askari, M., Karakadioglu, C., Ayhan, F., Ozcan, O. “MinIAQ-II: A Miniature Foldable Quadruped with an Improved Leg Mechanism,” IEEE ROBIO’17. IEEE International Conference on Robotics and Biomimetics, pp. 19-25, Macau, China, 2017.
Askari, M., Karakadioglu, C., Ayhan, F., Ozcan, O. “MinIAQ-II: A Miniature Foldable Quadruped with an Improved Leg Mechanism,” IEEE ROBIO’17. IEEE International Conference on Robotics and Biomimetics, pp. 19-25, Macau, China, 2017.
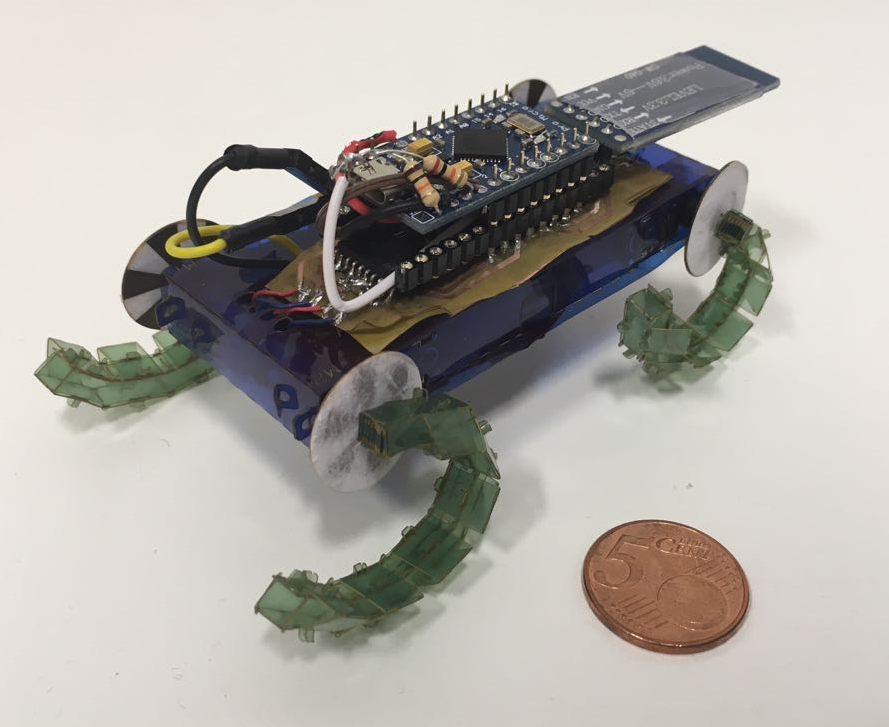 Guc, A. F., Kalin, M. A. I., Karakadioglu, C., Ozcan, O. “C-Quad: A Miniature, Foldable Quadruped with C-Shaped Compliant Legs,” IEEE ROBIO’17. IEEE International Conference on Robotics and Biomimetics, pp. 26-31, Macau, China, 2017.
Guc, A. F., Kalin, M. A. I., Karakadioglu, C., Ozcan, O. “C-Quad: A Miniature, Foldable Quadruped with C-Shaped Compliant Legs,” IEEE ROBIO’17. IEEE International Conference on Robotics and Biomimetics, pp. 26-31, Macau, China, 2017.
Askari M., Ugur M., Mahkam N., Yeldan A., Özcan O. “>Control and study of bio-inspired quadrupedal gaits on an underactuated miniature robot,,” Bioinspiration & Biomimetics, vol. 18, no. 2, Jan. 2023, doi:10.1088/1748-3190/acb127