Design, Fabrication and Theoretical and Experimental Analysis of a Bio-inspired Miniature Soft Robot
One of the biggest challenges of the robotic field is to enable locomotion of robots on rough surfaces. To utilize robots in routine tasks or dangerous and extreme environments and applications (such as search and rescue, leakage detection, mine sweeping), robots that can move comfortably on rough terrain, pass through small openings and function under tough environmental conditions, should be manufactured. One of the most suitable approaches that offer a solution to these challenges is the bio-inspired robotic systems. Centimeter-scale, insect-inspired miniature robots form an interesting research field in the newest line of robot families due to their transportability, cheap and easy manufacture, modularity potential and the possibility of autonomous and semi-autonomous operation. Despite all the advantages outlined, due to the hard materials used to make miniature robots, they cannot access spaces through openings smaller than their cross-sectional area and they can break when mechanically deformed until yield. In this project, we are proposing to design and fabricate a miniature and soft robot that can combine the deformation capabilities of soft materials with the many advantages of miniature robots to obtain a bio-inspired robot that can pass through openings smaller than its own cross-sectional area, travel on rough surfaces and relatively withstand mechanical deformations.

Kalin, M.A.I., Aygul, C., Turkmen, A., Kwiczak-Yigitbasi, J., Baytekin, B., Ozcan, O. “Design, Control, Fabrication and Maneuverability Analysis of an Untethered Miniature Soft Quadruped, SQuad,” IEEE Robotics & Automation Letters, vol. 5, no. 3, pp. 3854-3860, 2020, doi: 10.1109/LRA.2020.2982354.

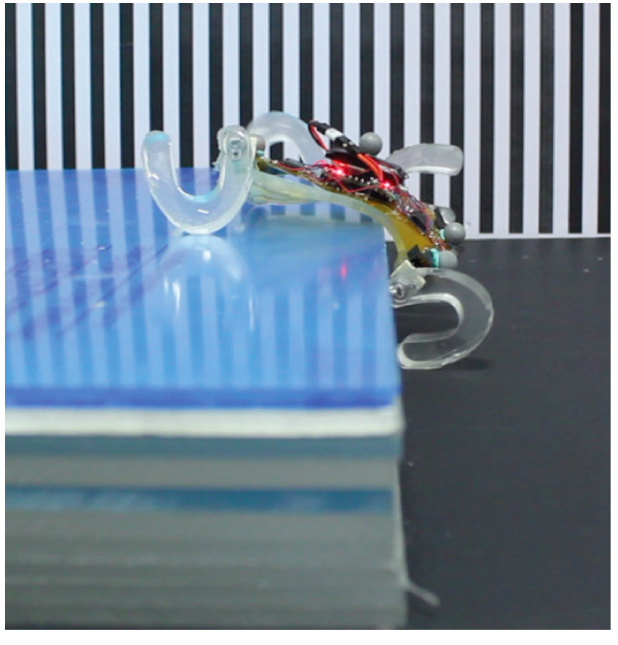 (SQuad climbing the obstacle 1.44 times its body height.)
(SQuad climbing the obstacle 1.44 times its body height.)
Ozbek, D., Yilmaz, T.B., Kalin M.A.İ., Senturk, K., Ozcan, O. “Detecting Scalable Obstacles using Soft Sensors in the Body of a Compliant Quadruped,” IEEE Robotics & Automation Letters, vol. 7, no. 2, pp. 1745 – 1751, 2022, doi: 10.1109/LRA.2022.3141655.
Özbek D. , Yılmaz T. B. , Kalın M. A. İ. , Özcan O. “Design and Fabrication of Soft 3D Printed Sensors and Performance Analysis of the Soft Sensors in a C-leg as Sensing Element,” Hittite Journal of Science and Engineering, vol. 9, no. 3, pp. 193-204, Sep. 2022, doi:10.17350/HJSE19030000271