Ucuz, Yazdırılabilir, Doğadan Esinlenilmiş Yürüyen Minyatür Robotların Tasarım ve Üretimi
Günümüzde doğadan esinlenilmiş yürüyen minyatür robotların üretimi ya klasik üretim metotları kullanılarak daha büyük boyutlarda, ya üç boyutlu yazıcılar kullanılarak, ya da temiz odada yürütülen fotolitografi yöntemleriyle yapılmaktadır. Bu üretim tekniklerinden fotolitografi malzemeye karşı seçici ve bir böcek boyutuna oranla daha küçük sonuçlar verirken, diğer iki üretim tekniği de böceklere kıyasla daha büyük sonuçlar vermektedirler.
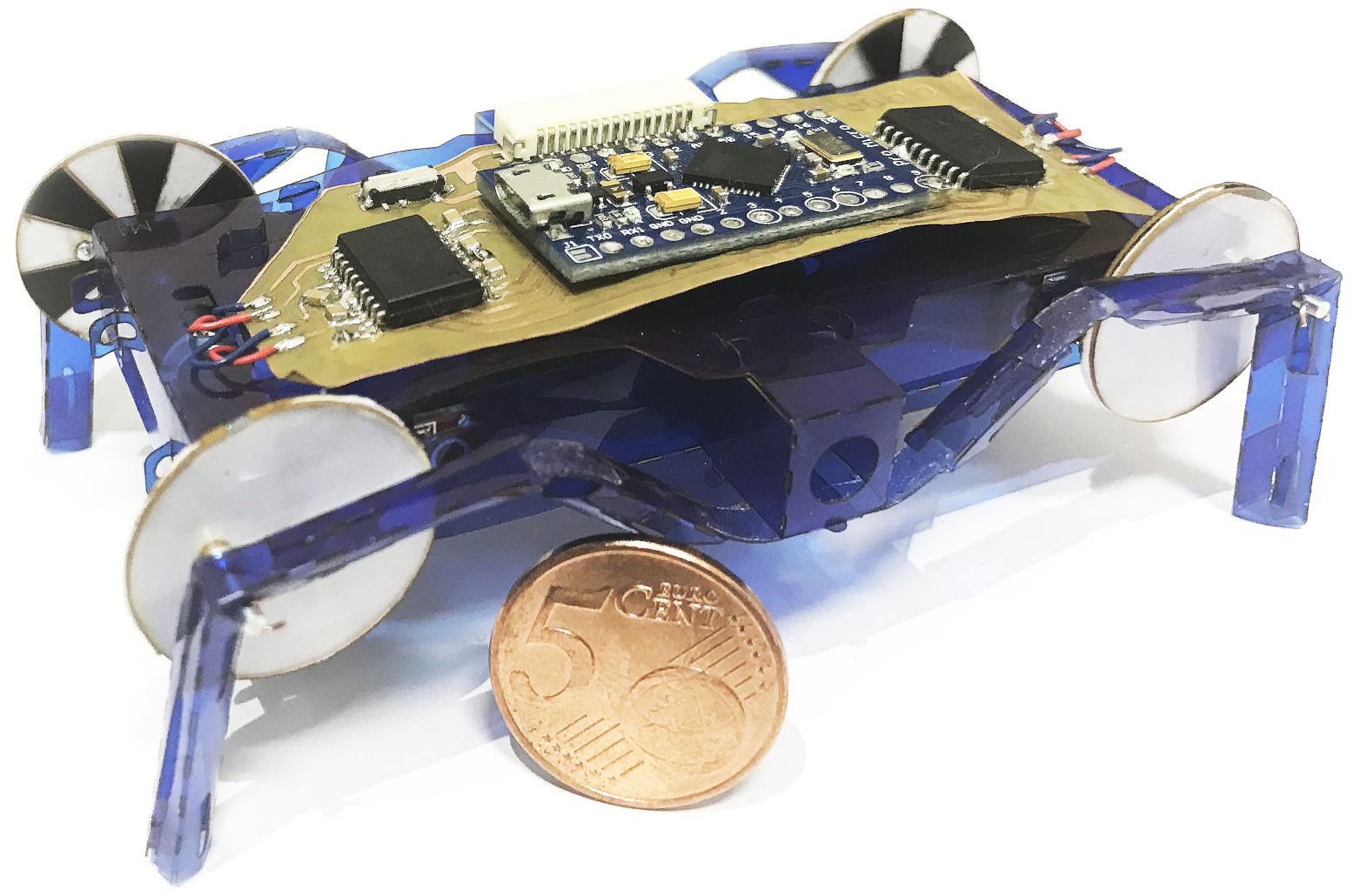
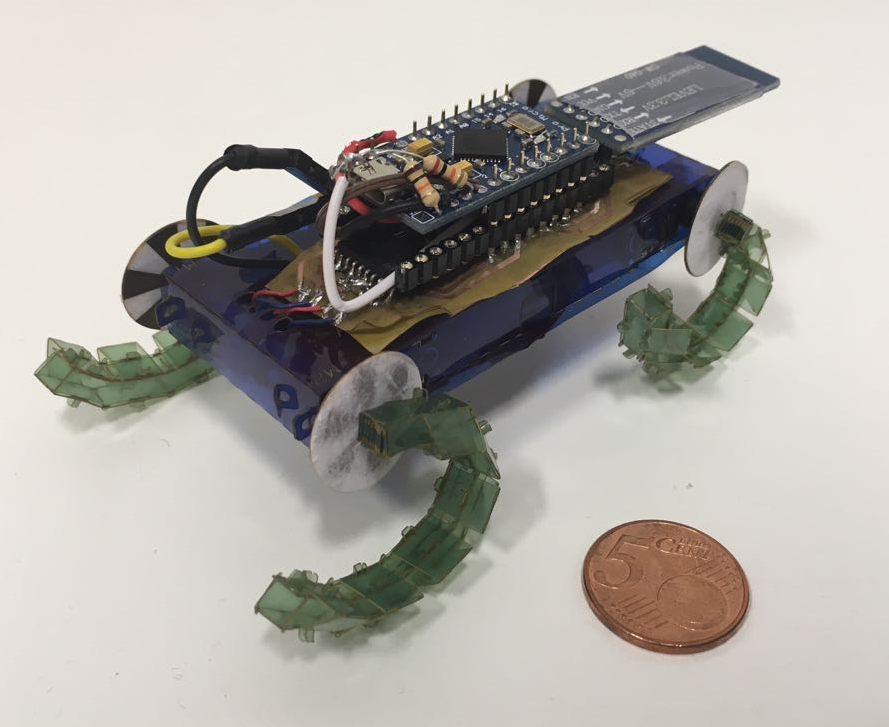
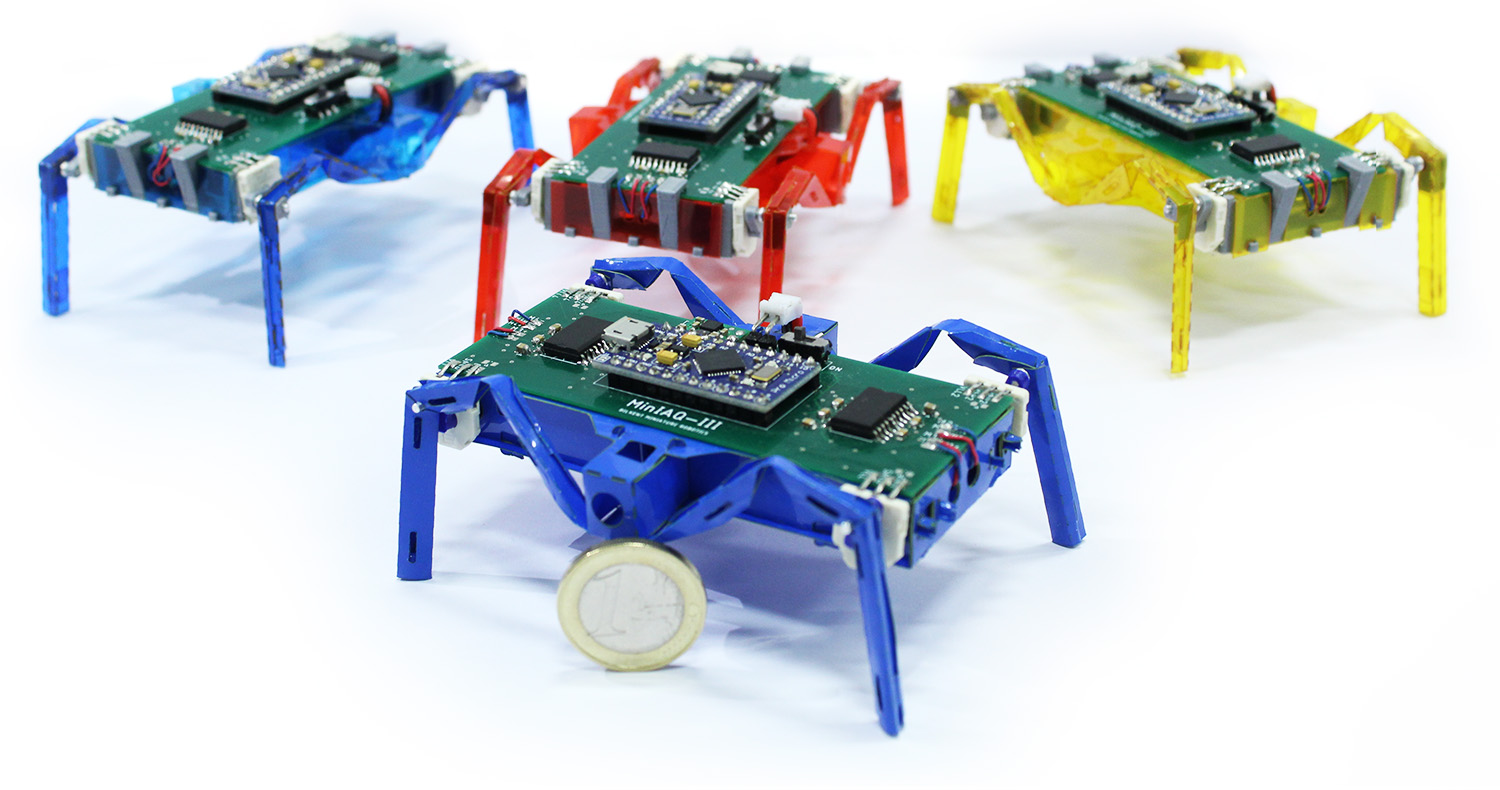
Projenin amacı, ucuz malzemeler ve ekipmanlarla, hızlı bir şekilde doğadan esinlenilmiş yürüyen minyatür robotlar üretmektir. Bu üretime robotların mekanik parçalarından devrelerine kadar her şeyi dahildir.
 Karakadioglu, C., Askari, M., Ozcan, O. “Design and Operation of MinIAQ: An Untethered Foldable Miniature Quadruped with Individually Actuated Legs,” IEEE AIM’17. IEEE International Conference on Advanced Intelligent Mechatronics, pp. 247-252, Münih, Almanya, 2017.
Karakadioglu, C., Askari, M., Ozcan, O. “Design and Operation of MinIAQ: An Untethered Foldable Miniature Quadruped with Individually Actuated Legs,” IEEE AIM’17. IEEE International Conference on Advanced Intelligent Mechatronics, pp. 247-252, Münih, Almanya, 2017.
 Askari, M., Karakadioglu, C., Ayhan, F., Ozcan, O. “MinIAQ-II: A Miniature Foldable Quadruped with an Improved Leg Mechanism,” IEEE ROBIO’17. IEEE International Conference on Robotics and Biomimetics, pp. 19-25, Macau, Çin, 2017.
Askari, M., Karakadioglu, C., Ayhan, F., Ozcan, O. “MinIAQ-II: A Miniature Foldable Quadruped with an Improved Leg Mechanism,” IEEE ROBIO’17. IEEE International Conference on Robotics and Biomimetics, pp. 19-25, Macau, Çin, 2017.
 Guc, A. F., Kalin, M. A. I., Karakadioglu, C., Ozcan, O. “C-Quad: A Miniature, Foldable Quadruped with C-Shaped Compliant Legs,” IEEE ROBIO’17. IEEE International Conference on Robotics and Biomimetics, pp. 26-31, Macau, Çin, 2017.
Guc, A. F., Kalin, M. A. I., Karakadioglu, C., Ozcan, O. “C-Quad: A Miniature, Foldable Quadruped with C-Shaped Compliant Legs,” IEEE ROBIO’17. IEEE International Conference on Robotics and Biomimetics, pp. 26-31, Macau, Çin, 2017.
Askari M., Ugur M., Mahkam N., Yeldan A., Özcan O. “>Control and study of bio-inspired quadrupedal gaits on an underactuated miniature robot,,” Bioinspiration & Biomimetics, vol. 18, no. 2, Jan. 2023, doi:10.1088/1748-3190/acb127