Altyapı Sistemlerinin Denetlenmesi İçin Ucuz, Minyatür ve Koordineli Uçan Hava Robotları
Bir ülkenin temel yaşam gereksinimlerinin karşılanmasını sağlayan köprü, baraj, yol gibi alt yapıların görevlerini istenilen düzeyde yerine getirebilmeleri için düzenli aralıklarla denetlenmesi, onarılması ve bakımlarının yapılması gerekmektedir. Denetleme, onarım ve bakım işleri genel olarak insan gücüne dayalı, oldukça yüksek emek ve zaman gerektiren faaliyetlerdir. Gelişen robot teknolojileri ile birlikte, alt yapı sistemlerinin işlevlerini düzgün bir şekilde devam ettirebilmeleri için gerekli olan bu faaliyetlerden özellikle “denetleme” kısmı için harcanan emek ve zamanın azaltılması mümkündür. Bu amaçla kullanılabilecek robotların çeşitli özellikleri barındırmaları gerekmektedir: Öncelikle, bu robotların görüntü alabilme özellikleri olmalıdır ve bu görüntüleri mümkün olan en kısa sürede operatöre iletebilmelidirler. Bunun dışında yerden belirli bir yüksekliğe çıkabilmeli ve o yükseklikte kararlı bir şekilde görevlerini yapabilmelidirler. Sayılan bu işlerin yapılabilmesini sağlayan en bilinen robot türü insansız hava aracı olarak da adlandırılan uçan robotlardır. Bu robotların alt yapı denetlenmesinde verimli bir şekilde kullanılabilmeleri için tek tek değil, takım olarak çalışmaları gerekmektedir. Bunun en büyük nedeni denetleme faaliyeti için harcanacak emek ve zamanın tek bir robot kullanıldığında, bir robot takımına kıyasla, üssel olarak artacak olmasıdır. Günümüzde gerek piyasada gerek açık literatürde var olan robot takımlarının en temel eksiklikleri, boyutları, ağırlıkları ve yapımlarında kullanılan malzemeleri dolayısı ile bir noktadan başka bir noktaya taşınmalarının zor olması ve kullanım maliyetlerinin yüksek olmasıdır. Rijit (esnek olmayan) malzemelerden yapıldıkları için birden fazla robottan oluşan bir takımın taşındığı sırada zarar görme ihtimali fazladır. Ayrıca boyutlarından ve ağırlıklarından dolayı küçük bir çantada taşınmaları zordur. Bunların yanında, uçuş sırasında oluşabilecek dikkatsizliklerden ya da beklenmeyen etkilerden dolayı oluşabilecek çarpma, düşme gibi olaylar sonucunda robotların işlevsiz hale gelmeleri sonucunda yenileri ile değiştirilmeleri ya da tamirleri gerekeceği için kullanım maliyetleri fazladır. Bu projenin özgün değeri, literatürdeki ve piyasadaki bu boşluğu dolduracak, elastik malzemelerden yapılmış, minyatür ve kullan-at tipinde, düşük maliyetli uçan robot takımlarının tasarlanacak ve üretilecek olmasıdır.Bu projenin amacı, alt yapı sistemlerinin denetlenmesinde kullanılacak, 3 adet uçan robottan oluşan bir uçan robot takımı tasarlamak ve üretmektir.

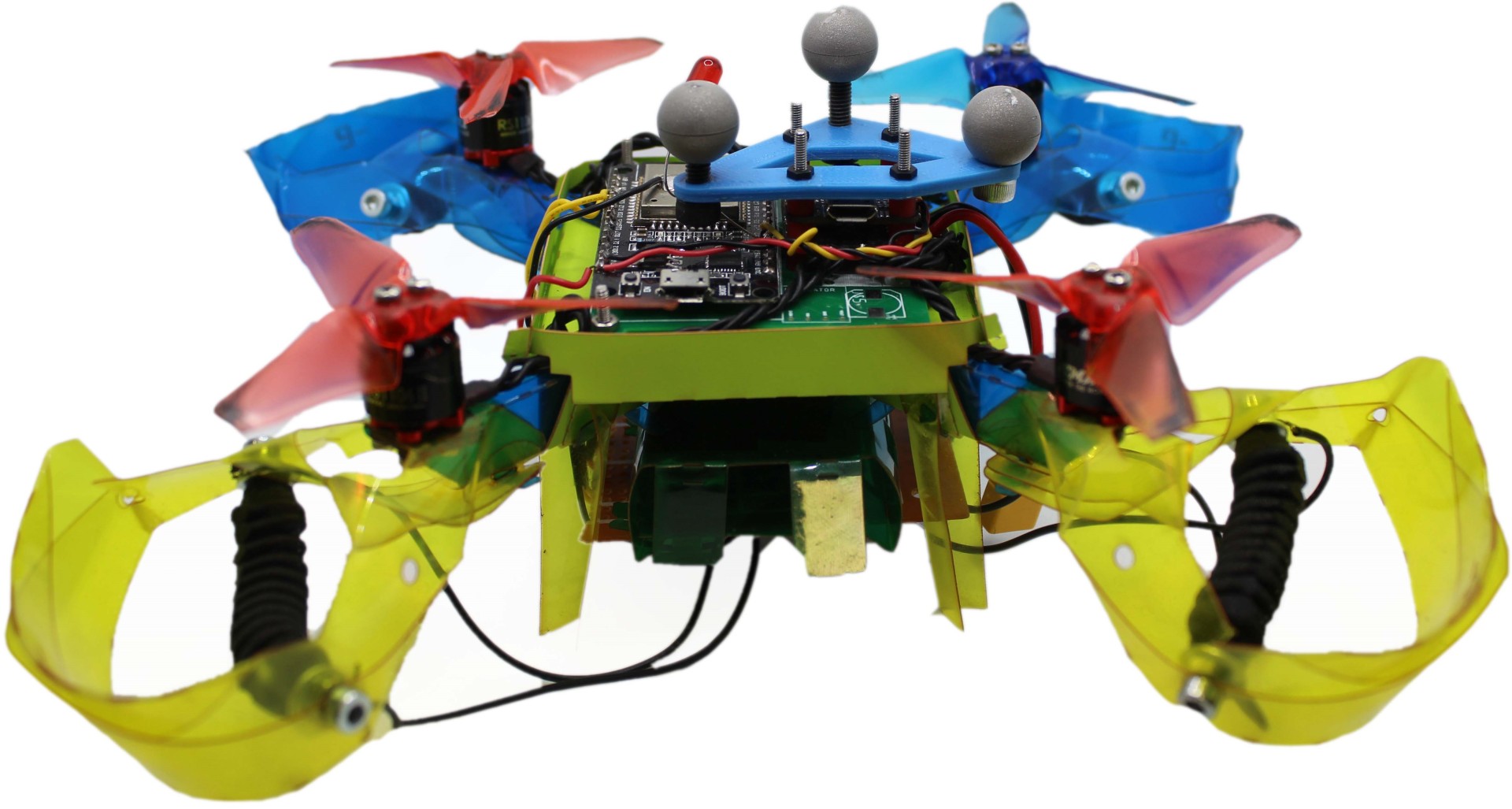
Dilaveroglu, L., Ozcan, O. “MiniCoRe: A Miniature, Foldable, Collision Resilient Quadcopter,” IEEE RoboSoft’ 20. IEEE International Conference on Soft Robotics, New Haven, CT, Amerika Birleşik Devletleri, 2020.
Bakır, A., Özbek, D., Abazari, A., Özcan, O. (2023). “SCoReR: Sensorized Collision Resilient Aerial Robot”, IEEE 6th International Conference on Soft Robotics (RoboSoft), 2023 (Değerlendirmede)