Bacak Sayısı ve Omurga Esnekliği Modüler Minyatür Robotlar: Tasarım, Modelleme ve Hareket Yeteneği Analizi
Yürüyen minyatür robotlar için ilham kaynağı olan böcekler çok bacaklı canlılardır. Bu özellikleri sayesinde uzuvlarından bir veya birkaç tanesi zorlu çevre şartları gibi herhangi bir nedenle işlevini kaybettiği zaman hareket kabiliyetlerini yitirmezler, bunun yerine eksik olan uzuv hesaba katılarak adımlama stillerini değiştirirler. Bunun yanında, hayvanların aksine böcekler omurgasızdır, bunun yerine mekanik dayanıklılık sağlayan dış iskeletleri vardır. Bu dış iskelet sert olmasıyla birlikte aynı zamanda esnektir. Bu sayede böcekler kendi kesit alanlarından çok daha küçük deliklerden geçebilirler. Dahası, kırkayak gibi eklem bacaklılar bükülebilir iskeletleri sayesinde dalga hareketi yaparak hızlı ilerleyebilirler. Hem bacak sayısı hem de esnek dış iskeletleri böceklerin ve eklem bacaklıların manevra ve bozuk zemindeki hareket kabiliyetlerine katkıda bulunmaktadır. Pek çok robotun tasarımında ilham aranırken omurga esnekliği ve çok bacaklı yapılar göz ardı edilmektedir. Bunun temel sebebi ise omurga esnekliğinin ağır robotların tasarımına dahil edilmesindeki zorluktur. Ağır robotlardaki aktif omurga eklemleri çok güçlü eyleyicilerin kullanımını gerektirirken, pasif eklemler ise robotun kendi ağırlığı altında çökmesine yol açabilir. Çok bacaklı yapılar ise robotlar için oluşturdukları gereksiz karmaşıklık nedeniyle çok yaygın değildirler. Omurga esnekliğinin ve bacak sayısının minyatür robotların hareket kabiliyeti üstündeki etkisi henüz yeterince incelenmemiş ve modellenmemiştir. Bundan dolayı, bu özellikler tasarımlara genellikle dahil edilmemiş ve bu özelliklerin robotların hareket kabiliyetlerine etkileri değerlendirilememiştir. Bu projenin amacı omurga esnekliğinin ve bacak sayısının minyatür robotların hareket kabiliyeti üstündeki etkisini omurga esnekliği ve bacak sayısı değiştirilebilen bir minyatür robot üzerinden teorik ve deneysel olarak incelemektir.

{kind=link}
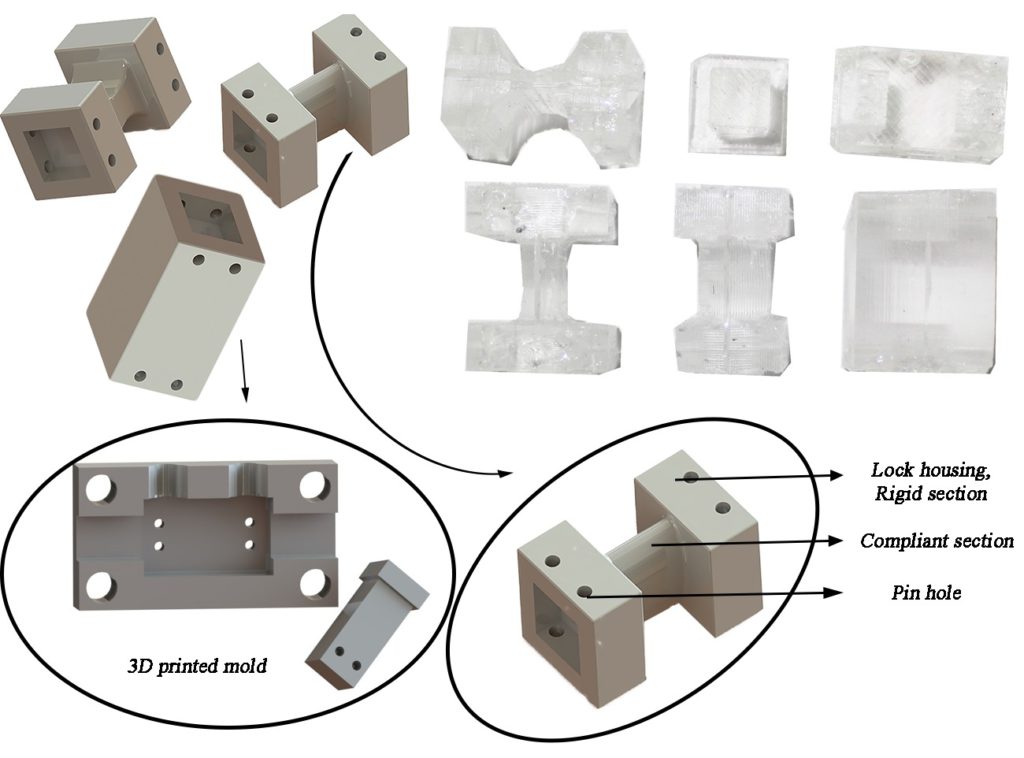
Mahkam, N., Bakir, A., Ozcan, O. “Miniature Modular Legged Robot with Compliant Backbones” IEEE Robotics & Automation Letters, vol. 5, no. 3, pp. 3923-3930, 2020, doi: 10.1109/LRA.2020.2982362.
Mahkam N., Ozcan, O. “A framework for dynamic modeling of legged modular miniature robots with soft backbones,” Elsevier Robotics and Autonomous Systems, vol. 144, p. 103841, 2021, doi: https://doi.org/10.1016/j.robot.2021.103841.

Mahkam N., Ozcan, O. “Gait and locomotion analysis of a soft-hybrid multi-legged modular miniature robot,” Bioinspiration & Biomimetics, 2021
Mahkam, N., Yilmaz, T.B., Ozcan, O. “Smooth and Inclined Surface Locomotion and Obstacle Scaling of a C-Legged Miniature Modular Robot,” 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft), 2021, pp. 9-14, doi: 10.1109/RoboSoft51838.2021.9479218.
Mahkam, N., Ugur, M., Ozcan, O. “Effect of Feet Failure and Control Uncertainties on the Locomotion of Multi-Legged Miniature Robots,” IEEE Robotics & Automation Letters, vol. 7, no. 2, pp. 5568-5574, 2022, doi: 10.1109/LRA.2022.3157945.
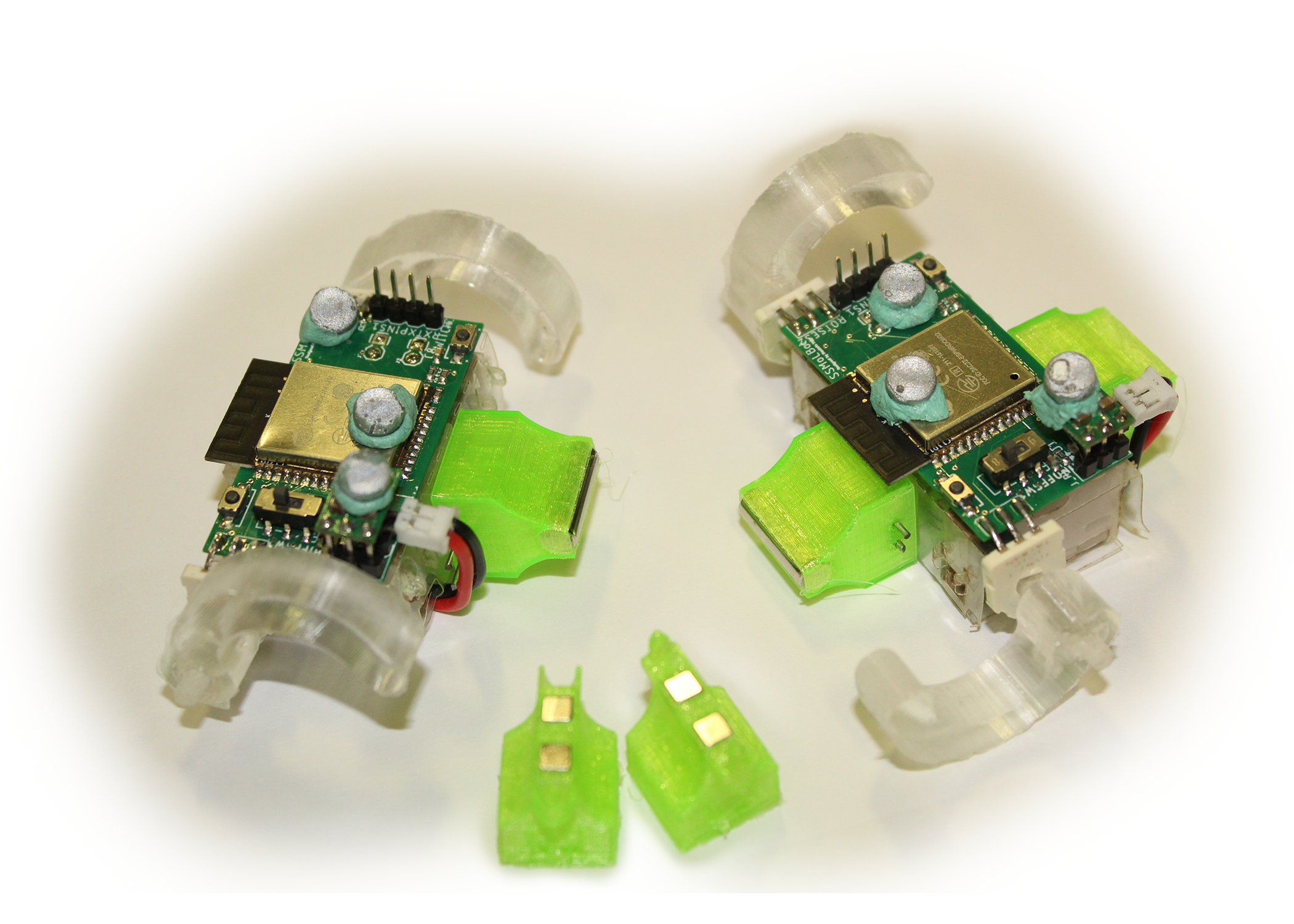
Uğur M. , Uygun M. , Bakır A. , Özcan O. “Path Tracking and Connection Mechanism of a Reconfigurable, Foldable, Legged, and Miniature Robot,” Hittite Journal of Science and Engineering, vol. 9, no. 3, pp. 205-211, Sep. 2022, doi:10.17350/HJSE19030000272
Uğur, N., Arslan, B., Özzeybek, A., Özcan, O. (2023). “Effects of Compliance on Path-Tracking Performance of a Miniature Robot”, IEEE 6th International Conference on Soft Robotics (RoboSoft), 2023 (Değerlendirmede)